Es bastante común para los humanos, especialmente aquellos que trabajan en la fabricación, atar un nudo, quitar la carcasa de un cable, insertar un pasador en un agujero o usar una herramienta manual como un taladro. Pueden parecer tareas simples, pero son realmente muy complejas e implican movimientos de dedos y manos extremadamente finos.
contenido relacionado
- Cómo los robots abandonaron el laboratorio y comenzaron a ayudar a los humanos
Aunque los robots se involucran cada vez más en el trabajo de la fábrica y en una amplia gama de otros tipos de trabajos, incluso en la industria de servicios y la atención médica, su destreza no es tan impresionante. Desde que las personas los llevaron por primera vez a trabajar en fábricas de automóviles hace más de 50 años, hemos construido robots que pueden soldar, pintar y ensamblar piezas bastante bien. Las mejores manos robóticas de hoy en día pueden recoger objetos familiares y moverlos a otros lugares, como tomar productos de los contenedores del almacén y colocarlos en cajas.
Pero los robots no pueden orientar una herramienta manual correctamente, por ejemplo, alineando un destornillador Phillips con las ranuras de un tornillo o apuntando con un martillo a un clavo. Y definitivamente no pueden usar las dos manos juntas de manera detallada, como reemplazar las baterías en un control remoto.
Las manos humanas son excelentes en esas tareas y mucho más. Para acercarse incluso a rivalizar con lo que nuestras manos son fácilmente capaces, las manos de robot necesitan una mayor agilidad, confiabilidad y fuerza, y deben ser capaces de sentir con mayor precisión y moverse aún más finamente de lo que lo hacen ahora, para descubrir qué son ' reteniendo y cómo agarrarlo mejor. Para que los robots puedan trabajar junto a los humanos, tendremos que descubrir cómo hacer robots que, literalmente, puedan echarnos una mano cuando nuestros propios dos no son suficientes.
Mi grupo de investigación en la Northeastern University está trabajando para hacer precisamente esto, en particular para los robots humanoides como Valkyrie de la NASA, que tiene tres dedos y un pulgar en cada mano. Cada dígito tiene articulaciones en forma de nudillo, y cada mano tiene una muñeca que puede girar fácilmente. Estamos trabajando en la creación de movimientos: combinaciones de movimientos de brazos, muñecas, dedos y pulgares que colectivamente realicen una tarea, como mover una llave inglesa en un círculo para apretar un tornillo o tirar de un carro de un lugar a otro.
 Cada uno de estos robots industriales tiene múltiples herramientas especializadas. ¿Podrían realizar muchas de sus tareas con manos robóticas? (Steve Jurvetson / flickr, CC BY)
Cada uno de estos robots industriales tiene múltiples herramientas especializadas. ¿Podrían realizar muchas de sus tareas con manos robóticas? (Steve Jurvetson / flickr, CC BY) La importancia de las manos.
En lugar de hacer de cada robot una máquina personalizada diseñada para una tarea muy específica, necesitamos diseñar robots de usos múltiples, o incluso máquinas capaces que puedan llamarse "de propósito general", lo que es bueno para casi cualquier tarea. Una clave para el éxito de este tipo de robots serán las manos excelentes.
Nuestro trabajo se centra en diseñar una nueva clase de manos de robot adaptables capaces de realizar movimientos precisos y de agarre autónomo. Cuando los robots puedan clavar clavos, cambiar las baterías y hacer otros movimientos similares, básicos para los humanos pero muy complejos para los robots, estaremos bien encaminados hacia la destreza humana en manos robóticas.
Alcanzar este objetivo también implica inventar nuevos diseños que incorporen elementos duros y blandos: la forma en que el hueso humano le da fuerza al agarre, con la piel extendiendo la presión para que una copa de vino no se rompa.
Desarrollo y pruebas más rápidos.
Las mejoras tecnológicas modernas están facilitando el proceso de desarrollo. Con la impresión 3D, podemos hacer prototipos muy rápidamente. Incluso podemos hacer componentes desechables de bajo costo para probar diferentes disposiciones de mecanismos, como pinzas de dos o tres dedos para tareas simples de recoger y colocar o manos antropomórficas de robot para operaciones más delicadas.
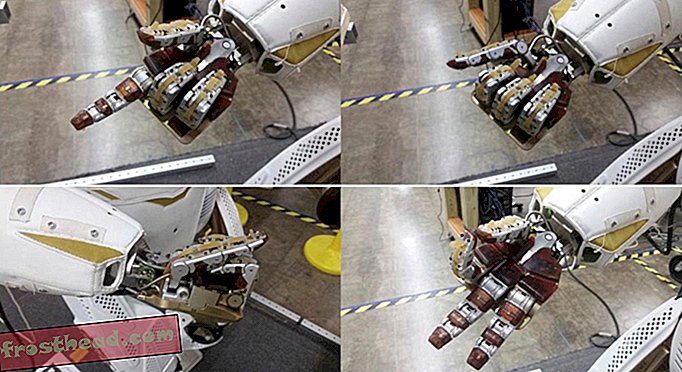 Diferentes tipos de manos en un robot Valkyrie de la NASA. (Universidad del noreste, CC BY-ND)
Diferentes tipos de manos en un robot Valkyrie de la NASA. (Universidad del noreste, CC BY-ND) A medida que las cámaras y sensores electrónicos se hacen más pequeños, podemos incorporarlos de nuevas maneras. Por ejemplo, si colocamos sensores de presión y cámaras en una mano robótica, pueden dar retroalimentación al controlador del robot (ya sea humano o automatizado) cuando un agarre es seguro o si algo comienza a resbalar. Un día podrán detectar en qué dirección se mueve el objeto deslizante, para que el robot pueda atraparlo.
Estas habilidades ya son una segunda naturaleza para los humanos a través de la visión y la propiocepción (la capacidad de sentir las posiciones relativas de las partes del cuerpo sin mirarlo o pensarlo). Una vez que podamos lograrlos en robots, podrán hacer cosas como detectar si un agarre es demasiado fuerte y está apretando un objeto con demasiada fuerza.
Planificación de movimientos coordinados
Otro hito será desarrollar métodos para que los robots descubran qué movimientos necesitan hacer en tiempo real, incluida la detección de lo que sucede en sus manos en cada momento. Si una mano de robot puede detectar cambios en los objetos que está manejando, o manipular elementos mientras los sostiene, podrían ayudar con esas tareas manuales comunes como atar nudos y pelar cables.
Trabajar con las dos manos juntas está aún más lejos en el futuro, aunque proporcionaría un impulso significativo, particularmente para la fabricación. Un robot que pueda operar un taladro con las dos manos o pasar partes de la máquina de una mano a la otra sería una gran mejora, permitiendo a las fábricas automatizar aún más pasos en sus procesos.
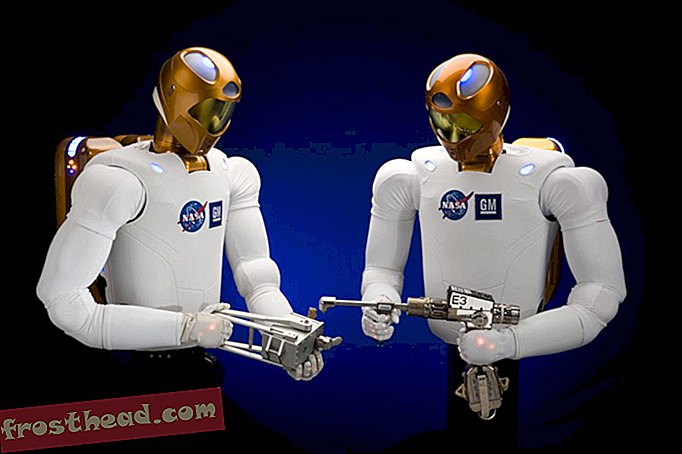 ¿Es este el robot del futuro? (NASA)
¿Es este el robot del futuro? (NASA) Los humanos aún no hemos desarrollado estos sistemas. Lograr la destreza de un robot autónomo similar al humano mantendrá ocupados a los investigadores, tecnólogos e innovadores en robótica en el futuro previsible. No ralentizará la revolución robótica en curso en la fabricación, porque los procesos actuales todavía tienen mucho espacio para la automatización para mejorar la seguridad, la velocidad y la calidad. Pero a medida que hagamos que los robots sean aún mejores, podrán ayudarnos.
Este artículo fue publicado originalmente en The Conversation.
Taskin Padir, profesor asociado de ingeniería eléctrica e informática, Northeastern University