Nos guste o no, estamos rodeados de robots. Miles de estadounidenses viajan al trabajo en estos días en autos que prácticamente se conducen solos. Las aspiradoras se desplazan por nuestras salas de estar por su cuenta. Los drones Quadcopter se cierran automáticamente sobre los campos agrícolas, realizando encuestas aéreas que ayudan a los agricultores a cultivar sus cultivos. Incluso los robots humanoides de aspecto aterrador, los que pueden saltar y correr como nosotros, pueden estar disponibles comercialmente en el futuro cercano.
Los dispositivos robóticos se están volviendo bastante buenos para moverse por nuestro mundo sin ninguna intervención de nuestra parte. Pero a pesar de estas habilidades recién descubiertas, todavía tienen una gran debilidad: los más talentosos del grupo aún pueden detenerse en seco con un simple picaporte.
El problema, dice Matt Mason, un robotista de la Universidad Carnegie Mellon, es que todas las habilidades existentes de los robots para moverse por el mundo de forma autónoma, no pueden interactuar físicamente con los objetos de manera significativa una vez que llegan allí.
“¿Qué hemos aprendido de la robótica? La lección número uno es que la manipulación es difícil. Esto es contrario a nuestra experiencia individual, ya que casi todos los humanos son manipuladores expertos ”, escribe Mason en un artículo de revisión reciente.
Es un punto justo. Los humanos manipulamos el mundo que nos rodea sin pensar. Agarramos, empujamos, giramos, cortamos y pinchamos objetos casi inconscientemente, gracias en parte a nuestras manos increíblemente diestras. Como resultado, hemos construido nuestros mundos teniendo en cuenta esos apéndices. Todos los teléfonos celulares, teclados, radios y otras herramientas que hemos manejado a lo largo de nuestra vida han sido diseñados explícitamente para caber en nuestros dedos y palmas.
No es así para los robots existentes. Por el momento, uno de los diseños de mano robótica más utilizados, llamado "pinza", es más o menos idéntico a los imaginados en la televisión en la década de 1960: un dispositivo hecho de dos dedos metálicos rígidos que pellizcan objetos entre ellos.
En un entorno controlado como una línea de ensamblaje, dispositivos como estos funcionan bien. Si un robot sabe que cada vez que llega a una parte específica, estará en el mismo lugar y orientación, entonces agarrarlo es trivial. "Está claro qué tipo de parte va a bajar por la cinta transportadora, lo que hace que la detección y la percepción sean relativamente fáciles para un robot", señala Jeannette Bohg, una robotista de la Universidad de Stanford.
El mundo real, por otro lado, es desordenado y lleno de incógnitas. Solo piense en su cocina: puede haber montones de platos que se secan al lado del fregadero, vegetales suaves y frágiles que recubren el refrigerador y múltiples utensilios rellenos en cajones estrechos. Desde la perspectiva de un robot, dice Bohg, identificar y manipular esa gran variedad de objetos sería un caos total.
“Esto es en cierto modo el Santo Grial, ¿verdad? Muy a menudo, desea manipular una amplia gama de objetos que las personas manipulan comúnmente, y han sido diseñados para ser manipulados por personas ", dice Matei Ciocarlie, investigador de robótica e ingeniero mecánico en la Universidad de Columbia. “Podemos construir manipuladores para objetos específicos en situaciones específicas. Eso no es un problema. La versatilidad es la dificultad ".
Para lidiar con la gran cantidad de formas únicas y propiedades físicas de esos materiales, ya sean sólidos como un cuchillo, o deformables, como una pieza de plástico, un apéndice robótico ideal necesariamente sería algo que se asemeje a lo que está al final de nuestros brazos Incluso con huesos rígidos, nuestras manos se doblan y flexionan a medida que agarramos objetos, por lo que si la mano de un robot puede hacer lo mismo, podría "enjaular" objetos dentro de su agarre y moverlos sobre una superficie al rastrillarlos como lo hace un bebé sus juguetes
Diseñar esa versatilidad no es poca cosa. Cuando los ingenieros de iRobot, la misma compañía que le trajo la aspiradora Roomba, desarrollaron una "mano" flexible de tres dedos hace varios años, fue aclamada como una gran hazaña. Hoy en día, los robotistas continúan alejándose de una réplica fiel de la mano humana, buscando materiales blandos y mejores herramientas computacionales como el aprendizaje automático para controlarlos.
La búsqueda de "manos" suaves y flexibles
"Las pinzas de tipo humano tienden a ser mucho más delicadas y mucho más caras, porque tienes muchos más motores y están empaquetados en un espacio pequeño", dice Dmitry Berenson, que estudia la manipulación robótica autónoma en la Universidad de Michigan. "Realmente, debes tener mucha ingeniería para que funcione, y mucho mantenimiento, por lo general". Debido a esas limitaciones, dice, las manos existentes similares a las humanas no son ampliamente utilizadas por la industria.
Para que una mano robótica sea práctica e incluso se acerque a la habilidad de un humano, tendría que ser firme pero flexible; ser capaz de sentir frío, calor y tacto a altas resoluciones; y sea lo suficientemente gentil como para recoger objetos frágiles pero lo suficientemente robusto como para soportar una paliza. Ah, y además de todo eso, tendría que ser barato.
Para solucionar este problema, algunos investigadores buscan crear un medio feliz. Están probando manos que imitan algunos de los rasgos propios, pero son mucho más simples de diseñar y construir. Cada uno usa "dedos" de látex suave accionados por cables tipo tendón que los abren y cierran. La ventaja de este tipo de diseños es su flexibilidad literal: cuando se encuentran con un objeto, pueden aplastarlo, formar su forma compleja y recogerlo cuidadosamente.
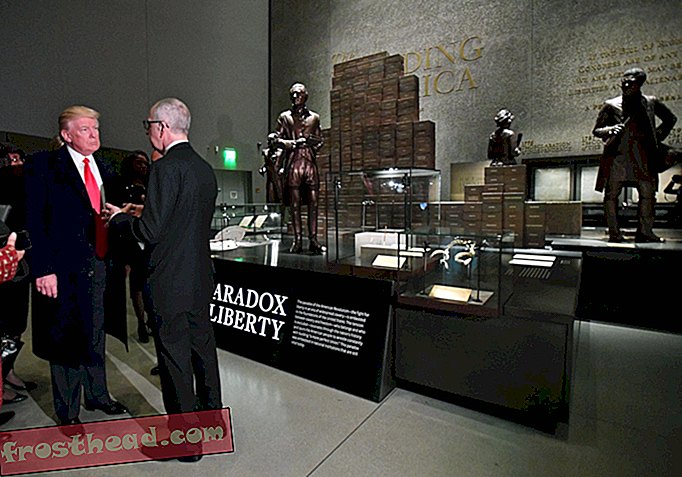
 En lugar de manos que imitan estrechamente las nuestras, algunos investigadores están trabajando en otras suaves y flexibles hechas de silicona. En esta imagen, los dedos huecos de silicona se curvan a medida que se llenan de aire, apretándolos alrededor de objetos de forma inusual. (J. MORROW ET AL / IEEE CONFERENCIA INTERNACIONAL SOBRE ROBÓTICA Y AUTOMATIZACIÓN (ICRA) 2016)
En lugar de manos que imitan estrechamente las nuestras, algunos investigadores están trabajando en otras suaves y flexibles hechas de silicona. En esta imagen, los dedos huecos de silicona se curvan a medida que se llenan de aire, apretándolos alrededor de objetos de forma inusual. (J. MORROW ET AL / IEEE CONFERENCIA INTERNACIONAL SOBRE ROBÓTICA Y AUTOMATIZACIÓN (ICRA) 2016) Estas "manos" blandas ofrecen una mejora importante sobre una pinza de metal duro. Pero solo comienzan a resolver el problema. Aunque un dedo elástico funciona muy bien para recoger todo tipo de objetos, tendrá dificultades con las habilidades motoras finas necesarias para tareas simples como colocar una moneda en una ranura, lo que implica no solo sostener la moneda, sino también sentir la ranura, evitando sus bordes, y deslizando la moneda dentro. Por esa razón, dice Ciocarlie, crear sensores que le digan a los robots más sobre los objetos que tocan es una parte igualmente importante del rompecabezas.
Nuestras propias yemas de los dedos tienen miles de receptores táctiles individuales incrustados dentro de la piel. "Realmente no sabemos cómo construir ese tipo de sensores, e incluso si lo hiciéramos, sería muy difícil conectarlos y recuperar esa información", dice Ciocarlie.
La gran cantidad de sensores requeridos generaría un segundo problema, incluso más complejo: qué hacer con toda esa información una vez que la tenga. Los métodos computacionales que permiten que un robot use grandes cantidades de datos sensoriales para planificar su próximo movimiento están comenzando a surgir, dice Berenson. Pero lograr que esas habilidades lleguen a donde deben estar puede superar todos los demás desafíos que enfrentan los investigadores para lograr la manipulación autónoma. Es posible que no sea posible construir un robot que pueda usar sus "manos" de manera rápida y sin problemas, incluso en situaciones completamente nuevas, a menos que los ingenieros puedan dotarlo de una forma de inteligencia compleja.
Esa capacidad intelectual es algo que muchos de nosotros los humanos damos por sentado. Para recoger un lápiz en nuestro escritorio, simplemente estiramos la mano y lo agarramos. Cuando cenamos, usamos pinzas, tenedores y palillos para agarrar nuestra comida con gracia y precisión. Incluso los amputados que han perdido miembros superiores pueden aprender a usar ganchos protésicos para tareas que requieren habilidades motoras finas.
“Pueden atar sus zapatos, pueden hacer un sándwich, pueden vestirse, todo con el mecanismo más simple. Entonces sabemos que es posible si tienes la inteligencia correcta detrás de esto ”, dice Berenson.
Enseñando la máquina
Llegar a ese nivel de inteligencia en un robot puede requerir un salto en los métodos actuales que usan los investigadores para controlarlos, dice Bohg. Hasta hace poco, la mayoría del software de manipulación implicaba construir modelos matemáticos detallados de situaciones del mundo real, y luego dejar que el robot usara esos modelos para planificar su movimiento. Un robot de reciente construcción encargado de ensamblar una silla Ikea, por ejemplo, utiliza un modelo de software que puede reconocer cada pieza individual, comprender cómo encaja con sus vecinos y compararlo con el aspecto del producto final. Puede terminar el trabajo de ensamblaje en aproximadamente 20 minutos. Sin embargo, pídale que ensamble un producto Ikea diferente, y quedará completamente desconcertado.
Los humanos desarrollan habilidades de manera muy diferente. En lugar de tener un conocimiento profundo sobre un solo tema estrecho, absorbemos el conocimiento sobre la marcha del ejemplo y la práctica, reforzando los intentos que funcionan y descartando los que no. Piense en la primera vez que aprendió a picar una cebolla: una vez que descubrió cómo sostener el cuchillo y cortarlo varias veces, es probable que no tenga que comenzar desde cero cuando se encuentra con una papa. Entonces, ¿cómo se consigue un robot para hacer eso?
Bohg cree que la respuesta puede estar en el "aprendizaje automático", una especie de proceso iterativo que le permite a un robot comprender qué intentos de manipulación son exitosos y cuáles no, y le permite usar esa información para maniobrar en situaciones que nunca se encuentran.
"Antes de que el aprendizaje automático entrara en el campo de la robótica, se trataba de modelar la física de la manipulación: elaborar descripciones matemáticas de un objeto y su entorno", dice. "El aprendizaje automático nos permite dar a un robot un montón de ejemplos de objetos que alguien ha anotado, mostrándole, 'Aquí hay un buen lugar para agarrar'". Un robot podría usar estos datos pasados para mirar un objeto completamente nuevo y entender cómo captarlo.
Este método representa un cambio importante de las técnicas de modelado anteriores, pero puede pasar un tiempo antes de que sea lo suficientemente sofisticado como para permitir que los robots aprendan por sí solos, dice Berenson. Muchos algoritmos de aprendizaje automático existentes necesitan una gran cantidad de datos sobre posibles resultados, como todos los movimientos potenciales en un juego de ajedrez, antes de que puedan comenzar a elaborar el mejor plan de ataque posible. En otros casos, pueden necesitar cientos, si no miles, de intentos de manipular un objeto determinado antes de tropezar con una estrategia que funcione.
Eso tendrá que cambiar si un robot se va a mover e interactuar con el mundo lo más rápido que la gente pueda. En cambio, dice Berenson, un robot ideal debería ser capaz de desarrollar nuevas habilidades en solo unos pocos pasos usando prueba y error, o ser capaz de extrapolar nuevas acciones a partir de un solo ejemplo.
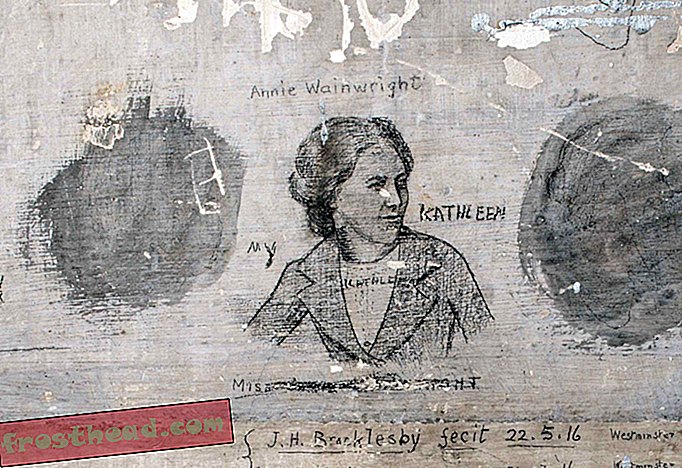
 Apollo, un robot construido por la ingeniera Jeannette Bohg, intenta mover un cilindro a través de una mesa mientras una caja de cartón bloquea su camino. En este experimento, un investigador cambió la caja a nuevas ubicaciones en la mesa a medida que el brazo se movía, obligando a Apolo a recalcular su trayectoria sobre la marcha. La imagen mezclada en la esquina inferior derecha muestra una vista desde la perspectiva de Apolo, subrayando lo difícil que es para un robot reconocer e interactuar con los objetos que lo rodean. (CORTESÍA JEANNETTE BOHG)
Apollo, un robot construido por la ingeniera Jeannette Bohg, intenta mover un cilindro a través de una mesa mientras una caja de cartón bloquea su camino. En este experimento, un investigador cambió la caja a nuevas ubicaciones en la mesa a medida que el brazo se movía, obligando a Apolo a recalcular su trayectoria sobre la marcha. La imagen mezclada en la esquina inferior derecha muestra una vista desde la perspectiva de Apolo, subrayando lo difícil que es para un robot reconocer e interactuar con los objetos que lo rodean. (CORTESÍA JEANNETTE BOHG) "La gran pregunta que hay que superar es, ¿cómo actualizamos los modelos de un robot no con 10 millones de ejemplos, sino uno ?", Dice. "Para llegar a un punto en el que diga: 'OK, esto no funcionó, ¿qué hago después?' Esa es la verdadera pregunta de aprendizaje que veo ".
Mason, el robotista de Carnegie Mellon, está de acuerdo. El desafío de programar robots para hacer lo que hacemos sin pensar, dice, se resume en algo llamado la paradoja de Moravec (llamada así por el pionero de la robótica Hans Moravec, que también enseña en Carnegie Mellon). En resumen, afirma que lo que es difícil para los humanos a menudo es manejado con facilidad por los robots, pero lo que es una segunda naturaleza para nosotros es increíblemente difícil de programar. Una computadora puede jugar al ajedrez mejor que cualquier persona, por ejemplo, pero lograr que reconozca y recoja una pieza de ajedrez por sí sola ha resultado ser asombrosamente difícil.
Para Mason, eso todavía suena cierto. A pesar del progreso gradual que los investigadores están haciendo en los sistemas de control robótico, dice, el concepto básico de manipulación autónoma puede ser una de las nueces más difíciles que el campo aún tiene que romper.
"El pensamiento racional y consciente es un desarrollo relativamente reciente en la evolución", dice. “Tenemos toda esta otra maquinaria mental que durante cientos de millones de años desarrolló la capacidad de hacer cosas increíbles, como la locomoción, la manipulación, la percepción. Sin embargo, todas esas cosas están sucediendo por debajo del nivel consciente.
"Tal vez las cosas que consideramos como una función cognitiva superior, como poder jugar al ajedrez o hacer álgebra, tal vez esas cosas son absolutamente triviales en comparación con la mecánica de la manipulación".
 Knowable Magazine es un esfuerzo periodístico independiente de Annual Reviews.
Knowable Magazine es un esfuerzo periodístico independiente de Annual Reviews.