En la película de 2018 de Steven Spielberg, Ready Player One, basada en el libro de 2011 de Ernest Cline, las personas entran en un mundo inmersivo de realidad virtual llamado OASIS. Lo más emocionante de la tecnología futurista en esta película de ciencia ficción no fueron las gafas de realidad virtual, que no parecen estar muy lejos de los auriculares que actualmente venden Oculus, HTC y otros. Era el compromiso de un sentido más allá de la vista y el sonido: el tacto.
Los personajes usaban guantes con retroalimentación que les permitía sentir los objetos imaginarios en sus manos. Podrían actualizarse a trajes de cuerpo completo que reproducen la fuerza de un puñetazo en el pecho o la caricia. Y sin embargo, estas capacidades también podrían no estar tan lejos como imaginamos.
Confiamos en la información táctil, o "háptica", continuamente, en formas que ni siquiera reconocemos conscientemente. Los nervios en nuestra piel, articulaciones, músculos y órganos nos dicen cómo están posicionados nuestros cuerpos, qué tan apretados estamos sosteniendo algo, cómo es el clima o que un ser querido muestra afecto a través de un abrazo. En todo el mundo, los ingenieros ahora están trabajando para recrear sensaciones táctiles realistas, para videojuegos y más. El contacto táctil en las interacciones humano-computadora mejoraría el control robótico, la rehabilitación física, la educación, la navegación, la comunicación e incluso las compras en línea.
"En el pasado, los hápticos han sido buenos para hacer que las cosas se noten, con vibraciones en su teléfono o los paquetes de ruidos en los controladores de juegos", dice Heather Culbertson, una científica de la computación de la Universidad del Sur de California. "Pero ahora ha habido un cambio hacia hacer cosas que se sientan más naturales, que imiten más la sensación de los materiales naturales y las interacciones naturales".
El futuro no es solo brillante, sino texturizado.
* * *
Los dispositivos hápticos se pueden agrupar en tres tipos principales: agarrables, ponibles y táctiles. Para comprender, piense en los joysticks. Una aplicación clara es la operación de robots, de modo que un operador pueda sentir cuánta resistencia está presionando el robot.
Tome robots quirúrgicos, que permiten a los médicos operar desde el otro lado del mundo, o manipular herramientas demasiado pequeñas o en espacios demasiado apretados para sus manos. Numerosos estudios han demostrado que agregar retroalimentación háptica al control de estos robots aumenta la precisión y reduce el daño tisular y el tiempo de operación. Las personas con retroalimentación háptica también les permiten a los médicos capacitar a pacientes que existen solo en la realidad virtual mientras obtienen la sensación de corte y sutura reales. Actualmente, uno de los estudiantes de Culbertson está desarrollando simuladores dentales para que la primera perforación errónea de un estudiante de odontología no sea en un diente real.
 Los ingenieros están construyendo sistemas para transmitir sensaciones táctiles realistas a los videojuegos, controles robóticos y más, con una gama de posibles aplicaciones. (Cortesía de la revista Knowable)
Los ingenieros están construyendo sistemas para transmitir sensaciones táctiles realistas a los videojuegos, controles robóticos y más, con una gama de posibles aplicaciones. (Cortesía de la revista Knowable) Tener una idea de lo que está haciendo el robot bajo su mando también sería útil para desactivar bombas o extraer personas de edificios derrumbados. O para reparar un satélite sin prepararse para una caminata espacial. Incluso Disney ha investigado los robots de telepresencia háptica para buscar interacciones humano-robot seguras. Desarrollaron un sistema que tiene tubos neumáticos que conectan los brazos robóticos de un humanoide con un juego de brazos de espejo para que un humano pueda agarrarlo. La persona puede manipular el robot espejo para que el primer robot sostenga un globo, levante un huevo o acaricie a un niño en las mejillas.
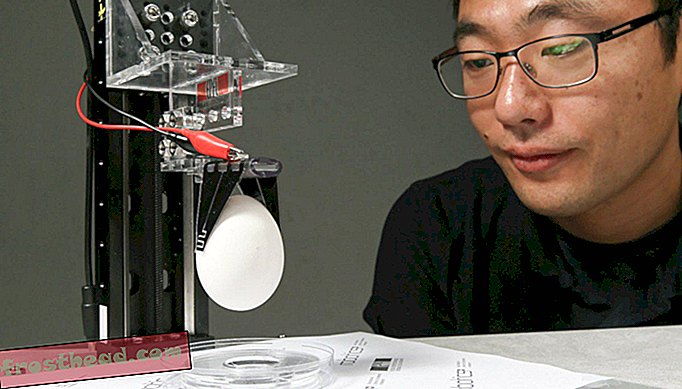
En menor escala, el laboratorio del robotista Jamie Paik del Instituto Federal Suizo de Tecnología de Lausana (EPFL) ha desarrollado una interfaz háptica portátil llamada Foldaway. Los dispositivos del tamaño y la forma de un posavasos cuadrado tienen tres brazos con bisagras que se abren, reuniéndose en el medio. (Stefano Mintchev, un postdoc en el laboratorio, los llama "robots de origami miniaturizados".) Se puede pegar un pequeño mango de plástico en la parte superior donde se unen los brazos, creando un joystick que actúa en tres dimensiones, y los brazos empujan hacia atrás, para dar el usuario tiene una idea de los objetos contra los que empuja. En demostraciones, el equipo ha utilizado los dispositivos para controlar un dron aéreo, apretar objetos virtuales y sentir la forma de la anatomía humana virtual.
Hay ciertos desafíos en el agarre de los hápticos que pueden parecer insuperables; por ejemplo, ¿cómo proporciona una sensación de peso al agarrar y levantar objetos digitales sin peso? Pero al estudiar neurociencia, los ingenieros han logrado encontrar algunas soluciones. Culbertson y sus colegas desarrollaron un dispositivo llamado Grabity para el problema de la gravedad. Es una especie de tornillo de banco que uno agarra y aprieta para recoger objetos virtuales. Simplemente al vibrar de ciertas maneras, puede producir la ilusión de peso e inercia.
Pero "engañar al cerebro solo va muy lejos", dice Ed Colgate, un ingeniero mecánico de la Universidad Northwestern que trabaja en hápticos. A veces es fácil romper las ilusiones hápticas. En su opinión, a la larga los ingenieros necesitarán recrear la física del mundo real, peso y todo lo más fielmente posible. "Ese es un problema realmente difícil".
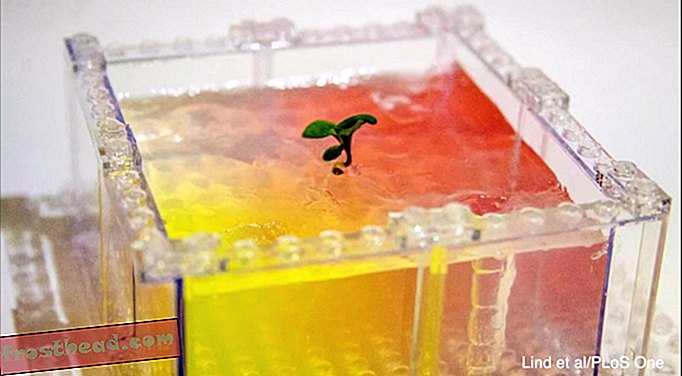
 El dispositivo táctil háptico llamado Grabity (parte inferior) proporciona la ilusión de peso e inercia para el manejo de objetos virtuales. Aquí imita la sensación de un bloque (arriba). (Cortesía de Stanford Shape Lab)
El dispositivo táctil háptico llamado Grabity (parte inferior) proporciona la ilusión de peso e inercia para el manejo de objetos virtuales. Aquí imita la sensación de un bloque (arriba). (Cortesía de Stanford Shape Lab) Los dispositivos que se pueden agarrar a menudo aprovechan las sensaciones kinestésicas: sensaciones de movimiento, posición y fuerza mediadas por los nervios no solo en nuestra piel sino también en nuestros músculos, tendones y articulaciones. Los dispositivos portátiles, por otro lado, generalmente dependen de sensaciones táctiles (presión, fricción o temperatura) mediadas por nervios en la piel.
Se usa una variedad de dispositivos experimentales en el dedo, presionando contra la almohadilla del dedo con diferentes grados de fuerza a medida que uno toca objetos en la realidad virtual. Pero un dispositivo reciente proporciona el mismo tipo de retroalimentación sin cubrir la almohadilla del dedo. En cambio, se usa donde uno podría usar un anillo y contiene motores que estiran la piel debajo. Eso mantiene los dedos libres para interactuar con objetos del mundo real sin dejar de sentir los "virtuales", una característica útil tanto para juegos como para aplicaciones serias.
En una prueba, una persona podía sostener un trozo de tiza real y sentir presión mientras "escribía" en una pizarra virtual en virtud de una ilusión táctil: al ver simultáneamente que la tiza entraba en contacto con el tablero y sentían su piel estirada, fueron engañados en sentir presión en la punta de sus dedos.
Más comúnmente, los dispositivos hápticos portátiles se comunican a través de la vibración. El laboratorio de Culbertson, por ejemplo, está trabajando en una pulsera que guía al usuario al vibrar en la dirección que necesita para girar. Y NeoSensory, una compañía fundada por el neurocientífico de Stanford David Eagleman, está desarrollando un chaleco con 32 motores vibratorios que se exhibió en un episodio de la serie de ciencia ficción Westworld de HBO, donde aparentemente ayudó a los personajes a identificar la dirección de los enemigos que se acercaban.
Una de las primeras aplicaciones reales del chaleco será traducir el sonido en sensación táctil para que el lenguaje hablado sea más inteligible para las personas con pérdida auditiva profunda o completa. Eagleman también está trabajando en traducir aspectos del mundo visual en vibraciones para personas ciegas. Otros esfuerzos involucran información más abstracta, como datos ambientales y de mercado: en lugar de una cuadrícula que indica dónde están las cosas espacialmente, un patrón complejo de vibraciones podría indicar los precios de una docena de acciones.
 Esta imagen muestra el diseño de un material suave y flexible similar a la piel que se adapta al cuerpo, para dispositivos hápticos portátiles. Las capas del sensor y el actuador están separadas por capas de silicona. En la capa del sensor, el titanato de zirconato de plomo (PZT) traduce la fuerza en carga eléctrica para la retroalimentación a la computadora. La capa del actuador contiene pequeños bolsillos que pueden llenarse de aire muchas veces por segundo para la retroalimentación vibratoria al usuario. (Adaptado de HA Sonar et al / Frontiers in Robotics and AI 2016)
Esta imagen muestra el diseño de un material suave y flexible similar a la piel que se adapta al cuerpo, para dispositivos hápticos portátiles. Las capas del sensor y el actuador están separadas por capas de silicona. En la capa del sensor, el titanato de zirconato de plomo (PZT) traduce la fuerza en carga eléctrica para la retroalimentación a la computadora. La capa del actuador contiene pequeños bolsillos que pueden llenarse de aire muchas veces por segundo para la retroalimentación vibratoria al usuario. (Adaptado de HA Sonar et al / Frontiers in Robotics and AI 2016) Los motores vibratorios pueden ser voluminosos, por lo que algunos laboratorios están desarrollando soluciones más cómodas. El laboratorio de Paik en EPFL está trabajando en una piel suave de actuador neumático (SPA): una lámina de silicona flexible de menos de 2 milímetros de grosor que está salpicada de pequeñas bolsas de aire. Se pueden inflar y desinflar de forma independiente docenas de veces por segundo y, por lo tanto, actúan como píxeles, o "taxels", para elementos táctiles, creando una red de sensaciones. Pueden proporcionar sentimientos del tipo que ofrecen los trajes en Ready Player One, o comentarios sobre la colocación de robots o prótesis. La máscara SPA también está integrada con sensores hechos de una nueva aleación de metal resistente a la corrosión que permite utilizar la misma máscara para la entrada de la computadora cuando el usuario la aprieta.
También hay una película háptica aún más delgada, de menos de medio milímetro de espesor, creada por Novasentis y hecha de una nueva forma de plástico de fluoruro de polivinilideno que equilibra la resistencia, la flexibilidad y la capacidad de respuesta eléctrica. Cuando la película se coloca en capas en un lado de una lámina de material flexible y se aplica una carga eléctrica, la película se contrae y flexiona la lámina, aplicando presión contra la piel. Novasentis ahora proporciona el material a los fabricantes de dispositivos que lo ponen en guantes para la realidad virtual y los juegos.
"Se puede distinguir entre agua, arena y roca", dice Sri Peruvemba, vicepresidente de marketing de la compañía. Los diseñadores de realidad virtual también podrían crear representaciones más abstractas, como mensajes entregados por sensaciones sobre el estado de un juego. "Podemos crear un lenguaje háptico completo con nuestra tecnología", dice Peruvemba.
Las vibraciones pueden producir otro tipo de ilusión táctil: la sensación de jalar. Si un dispositivo que vibra hacia adelante y hacia atrás en paralelo a la superficie de la piel se mueve rápidamente en una dirección y lentamente hacia la otra, muchas veces por segundo, se siente como si tirara de la piel en la primera dirección.
Si bien la mayoría de los wearables usan la sensación táctil, también pueden usar el aporte de la articulación muscular-tendinosa de la sensación cinestésica. Los ingenieros han desarrollado exoesqueletos robóticos, una especie de andamiaje sujeto al cuerpo con sensores y motores, que pueden ayudar a las personas paralizadas a caminar, darles a los soldados una gran fuerza y dejar que las personas controlen robots a distancia. Un laboratorio de EPFL ha desarrollado el FlyJacket, que se usa con los brazos extendidos hacia los lados, conectados por pistones a la cintura. No parece especialmente volar, pero permite a las personas controlar el vuelo de los drones aéreos moviendo los brazos y girando los torsos. Cuando el dron siente una ráfaga de viento, tú también.
La categoría final de dispositivos son las interfaces táctiles, como las pantallas de los teléfonos inteligentes que dan un pequeño golpe al hacer clic en una aplicación. El trabajo de Culbertson va más allá de simples golpes y zumbidos. Simula la textura en superficies usando lo que llama "hápticas basadas en datos". En lugar de escribir algoritmos complicados o modelos físicos para generar vibraciones que simulan las reales, registra lo que sucede cuando se arrastra algo sobre diferentes tejidos u otros materiales a diferentes velocidades y presiones Luego tiene una superficie que reproduce las vibraciones cuando se arrastra un bolígrafo sobre ella. Las aplicaciones pueden incluir compras en línea y museos virtuales.
 Un dispositivo táctil táctil permite al usuario "sentir" diferentes texturas dependiendo de qué patrones de vibraciones se transmiten a través del lápiz. Las vibraciones cambian según la velocidad con la que se mueve el lápiz o la presión que aplica el usuario. El objetivo es simular de manera realista la aspereza, la dureza y el deslizamiento de las superficies. (Cortesía de Heather Culbertson)
Un dispositivo táctil táctil permite al usuario "sentir" diferentes texturas dependiendo de qué patrones de vibraciones se transmiten a través del lápiz. Las vibraciones cambian según la velocidad con la que se mueve el lápiz o la presión que aplica el usuario. El objetivo es simular de manera realista la aspereza, la dureza y el deslizamiento de las superficies. (Cortesía de Heather Culbertson) Las superficies táctiles también permiten tipos de ilusiones. Por ejemplo, dice Culbertson, tocar el sonido de un botón haciendo clic cuando se toca la imagen de un botón hace que parezca que el botón realmente está haciendo clic. O hacer que la pantalla parezca deformarse bajo el dedo puede hacer que se sienta más suave. Las personas construyen la percepción al unir la vista, el sonido, el tacto, el gusto y el olfato, y, como dice Culbertson, "es realmente fácil engañar a tu cerebro si tienes un desajuste entre tus sentidos".
Los hápticos realistas para la realidad virtual pueden ser torpes y costosos para siempre. O la tecnología puede hacer que Ready Player One parezca pintoresco. En cualquier caso, como podemos ver con pasos pequeños como el ruido generalizado de los controladores de videojuegos y los teléfonos y relojes que vibran sin cesar, los dispositivos hápticos están aquí para quedarse, agregando una nueva dimensión a nuestras vidas digitales.
 Knowable Magazine es un esfuerzo periodístico independiente de Annual Reviews.
Knowable Magazine es un esfuerzo periodístico independiente de Annual Reviews.